”c vtk vs2017 三维“ 的搜索结果
从三维点云基础知识到深度学习,将按照以下目录持续进行更新。更新完成的部分可以在三维点云专栏中查看。含数据与python源码。
c++程序,vs2017上运行,可以由双目相机拍得的照片任意一点求取该点的三维坐标,误差在1%左右。




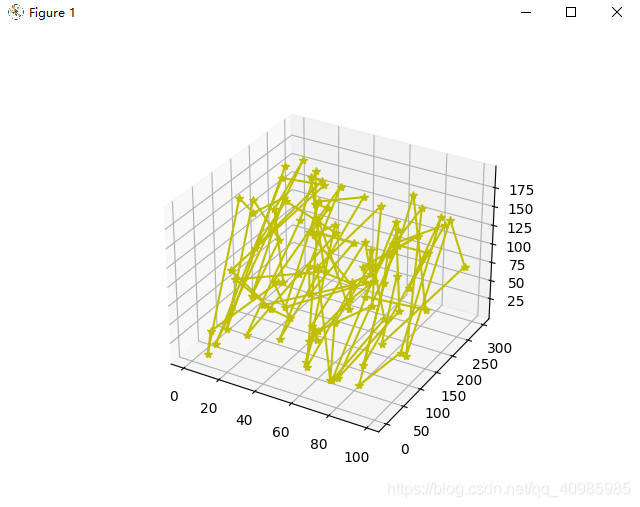
Python三维绘图 在遇到三维数据时,三维图像能给我们对数据带来更加深入地理解。python的matplotlib库就包含了丰富的三维绘图工具。 1.创建三维坐标轴对象Axes3D 创建Axes3D主要有两种方式,一种是利用关键字...

地面三维激光扫描技术与全站仪测量技术、近景摄影测量技术相比有其自身的优势,主要特点有:非接触测量、数据采用频率高、精度高全景复制等特点。本章主要学习三维激光扫描入门基础知识。主要内容有:一、基本概念;...

三维平面的统一表示方法: 假设(x1, y1, z1)、(x2,y2,z2)为平面上两个点,那么可以得到: (x2-x1, y2-y1, z2-z1)是平面上的一个向量,并且根据上式可知,(A, B, C)与这个向量垂直,显然(A, B, C)为平面的...

三维可视化神器带来无限可能,原来三维场景也可以如此轻松实现


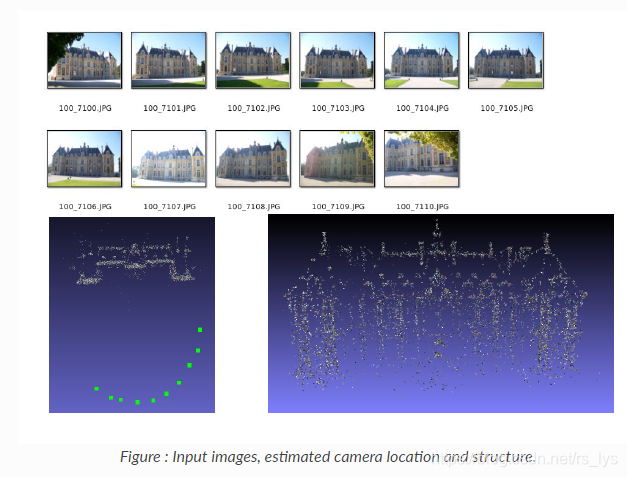
目前(2023年)主流的三维重建方法主要分为以下两类:基于深度相机(结构光、TOF、双目摄像头)的三维重建基于图像的三维重建。




所以我将它分为三个步骤。 第一步:导入数据 如果是mat数据。可以直接load 如果是txt数据。可以用txtread 如果是excel数据。可以用xlsread 详细的,可以参考...

准备工作:我们需要四列数据,分别用来做X轴、Y轴、Z轴,三维对应的数据得到的结果(第四维用颜色表示)第一步:导入数据,在表格中设置X轴、Y轴、Z轴 第二步:让Book1获得焦点后,点击上面选项卡中的plot,选择三维...
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地